post plant

Graduation project, 2020
Industrial design, Interaction design, Mechanical design, HRI research, Creative direction
Collaborated with
Electrical engineering: Jaeyeon Park, Taeyun Li
Film directing: Minkyeong Song
CG: Yejin Choi

Post Plant is a plant-like robot which communicates nonverbally through physical movement. Until now, robots have in most cases communicated with us by mimicking human speech and human/animal expressions and gestures. Post Plant takes a radically different approach by assuming a form inspired by plants; responding to touch instead of language, it nonverbally conveys simple emotions and information feedback. With Post Plant as a starting point, robots of the future will communicate with us in their own way, without having to mimic human behavior.
postplant sends you a message with its movements instead of words, expressions, gaze, and hand gestures. Feel the delicate signals they deliver.
Film Credit
Director: Song Minkyeong
Director of Photography: Lee Siyoung
Cast: Lee Seungmin
Director: Song Minkyeong
Director of Photography: Lee Siyoung
Cast: Lee Seungmin
pp-1 is a tree-like robot. Its message is delivered in a way that the upper and lower axes contract and release through the twisting movement. We can easily see that it is negative by looking at the twisted shape of pp-1. If you approach it and touch the upper part or sweep the stem, pp-1 can return to a healthy state.
pp-2 is a flower-like robot. Its message is delivered through a sense of rhythm from the speed and direction of rotation. If pp-2 is frozen, touch it slightly. It will naturally move in the direction you touch and respond. Even when pp-2 is moving unstable, it will be fine if you touch it once.
Why robots?
How can we communicate with robots without face, arms, legs?
Most of the Robots in Sci-Fi movies are humanoids. They communicate with voice, gestures, and facial expressions. However in reality, most of the industrial robots have no face, some of them only have arms or legs. In the future, we need to figure out a new way to communicate with robots even witout face, legs, arms, whatever that look like human or animals.
There are two main reasons for this. With the current technology, robots with physical shapes cannot communicate on the same level as humans. This is not something that can be achieved when a single technology is completed, but human-like interaction is applied to robots for a very long period of time, so it is difficult to communicate at the same level as humans at the moment.
Second, and more important than this, is the meaning. If you make a robot that resembles a human, it represents a human being. If you make a robot that mimics the physical characteristics of a specific gender, for example, a woman, the robot is not a robot but a female representation. Likewise, when a robot is made with a cute and weak object such as a puppy or a child as a model, the robot does not exist only as a robot, but becomes an entity representing something represented. For example, beating a dog robot is not only violence against the robot, but also violence against the underlying dog. For this reason, a robot must have a robot-like ‘new’ shape, and a new communication method that can communicate only with ‘movement’ must be found.
Second, and more important than this, is the meaning. If you make a robot that resembles a human, it represents a human being. If you make a robot that mimics the physical characteristics of a specific gender, for example, a woman, the robot is not a robot but a female representation. Likewise, when a robot is made with a cute and weak object such as a puppy or a child as a model, the robot does not exist only as a robot, but becomes an entity representing something represented. For example, beating a dog robot is not only violence against the robot, but also violence against the underlying dog. For this reason, a robot must have a robot-like ‘new’ shape, and a new communication method that can communicate only with ‘movement’ must be found.

 image credit: SONY, GQ
image credit: SONY, GQWhy plants?
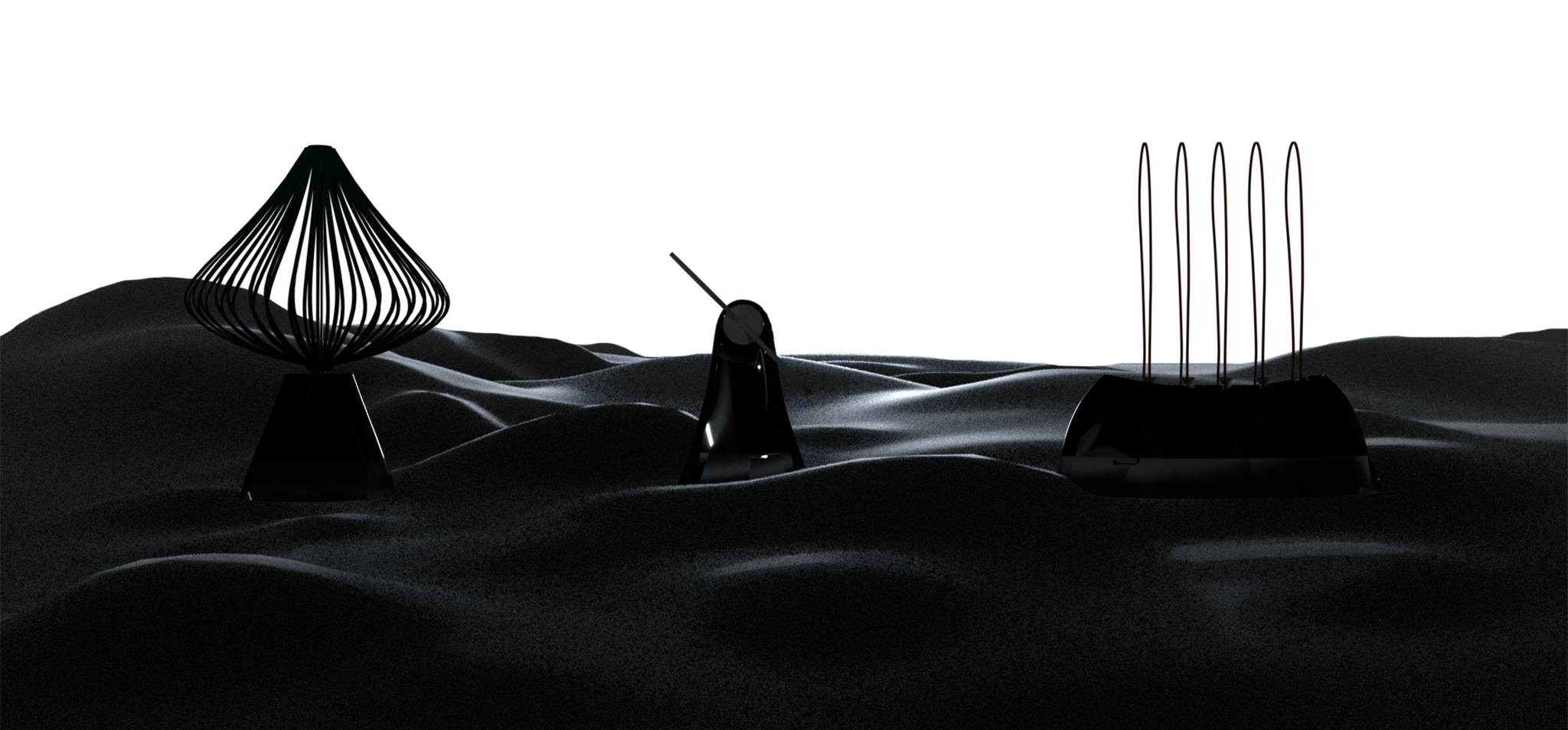



Plant-looking post plant

So, why do postplants resemble plants? Plants sometimes appear dead because they move much slower than humans. But as you know, the world of plants is fierce. It's just slow. They interact with each other and compete with each other. Postplant uses plants as motifs to transform perceptions by representing plants that are not recognized as dynamic subjects by people, and to make unfamiliar and familiar feelings coexist.
Process
Research

First, in order to define the communication method of non-humanoid robots, literature studies were conducted on non-verbal communication methods of robots. Based on theories of Laban, psychologists James A. Russell, David Chalmers, Daniel Dennett, etc. I concluded that humans read emotions and information from movement. In particular, the roboticist Cynthia Breazeal's AVS theory, that is, Arousal (awareness level), Valence (positive or negative), and Stance (open attitude or closed attitude), influenced how I mapped the shape and movement of the postplant into emotional expressions.
The movement of postplant, even a very simple expression, was made based on these philosophical and engineering theories. Therefore, people can instinctively read the movement of the postplant without learning. Also, by arranging various theories about movement, I started to observe objects based on the degree of freedom of movement by using the four characteristics of freedom and movement: direction, speed (tempo, speed, acceleration), and volume (size, kinisphere). I
I found hints from the shape and movement of objects and organized them into the concept of ‘motion affordance’.

‘Motion affordance’ refers to the implied motion of the shape of an object. The rightmost shape in the image is taken from the swing. The shape of swing includes two strings spanning while holding the mass in place, allowing it to move back and forth. However, if you make a gap in the upper cylinder so that it can move from right to left like the image in the middle, this structure will have one more degree of freedom than the previous swing. Similarly, when the shape, not the structure, is changed, the movement is different. The rotating mass inserted into the circular rail on the left implies a different movement than the two on the right. Combining numerous degrees of freedom and numerous shapes and structures in this way can produce infinite motion affordances.

However, if this process is carried out arbitrarily, the structure may be far from reality. Therefore, it is necessary to observe and analyze things in reality.

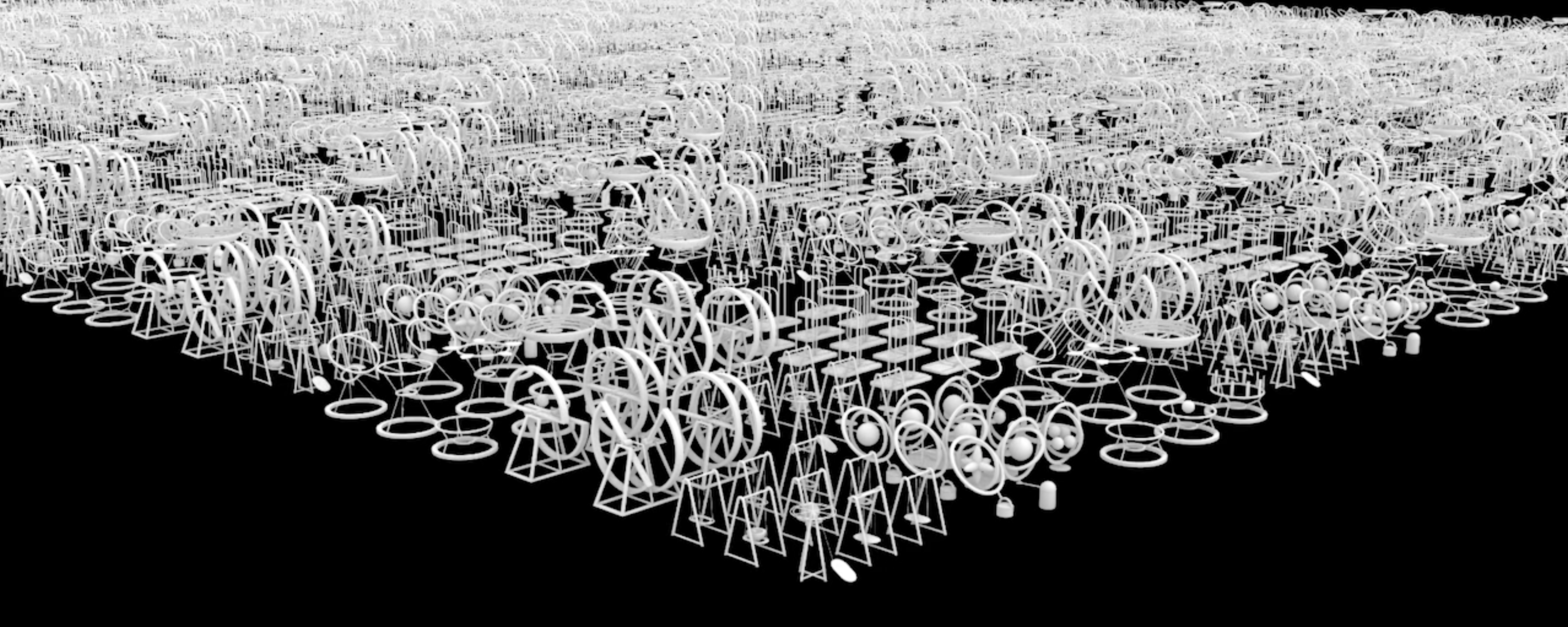
 Structural analysis1. Classification based on degree of freedom type
Structural analysis1. Classification based on degree of freedom type
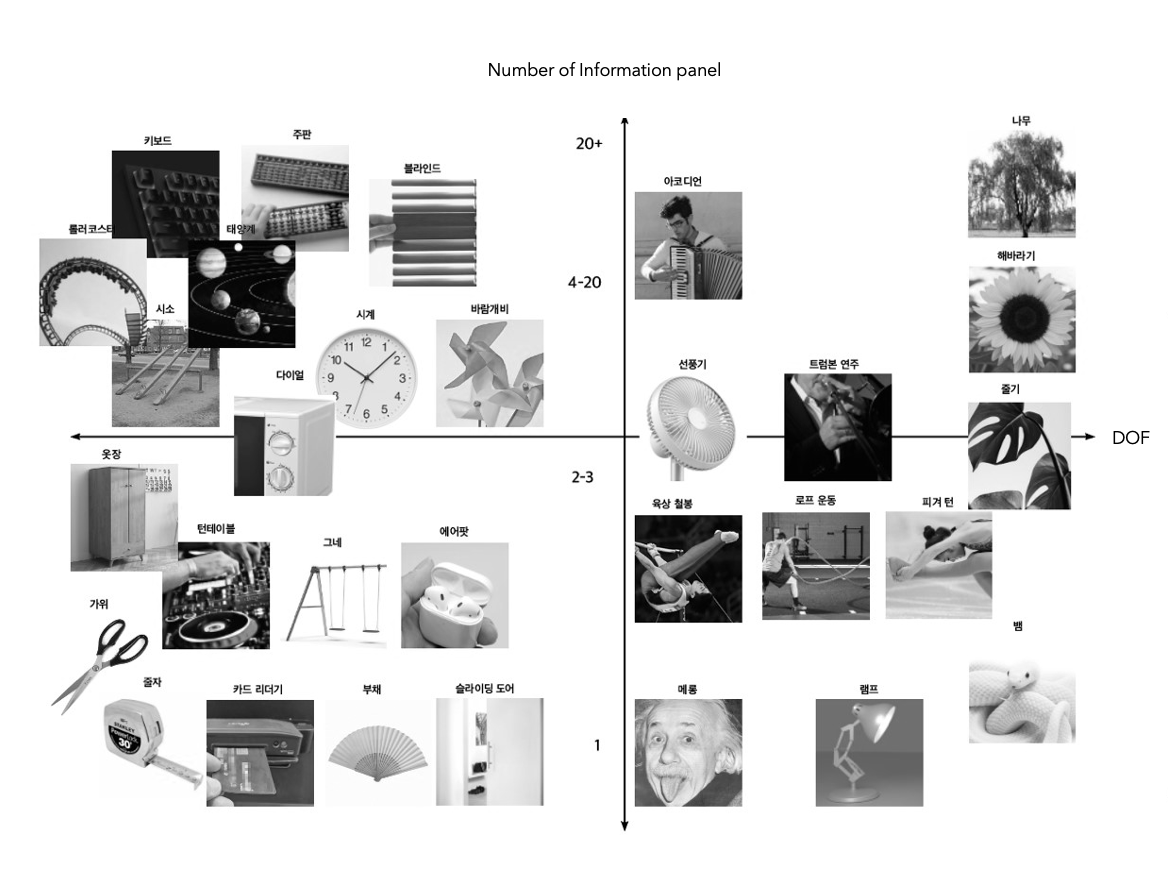
Structural analysis2. Classification by number of information elements
After completing structural and theoretical analysis of movement and information expression, the most appropriate plan was selected among the narrowed structures.
initial working prototypes for testing interactions
Soft mock-ups

Material and shape prototyping

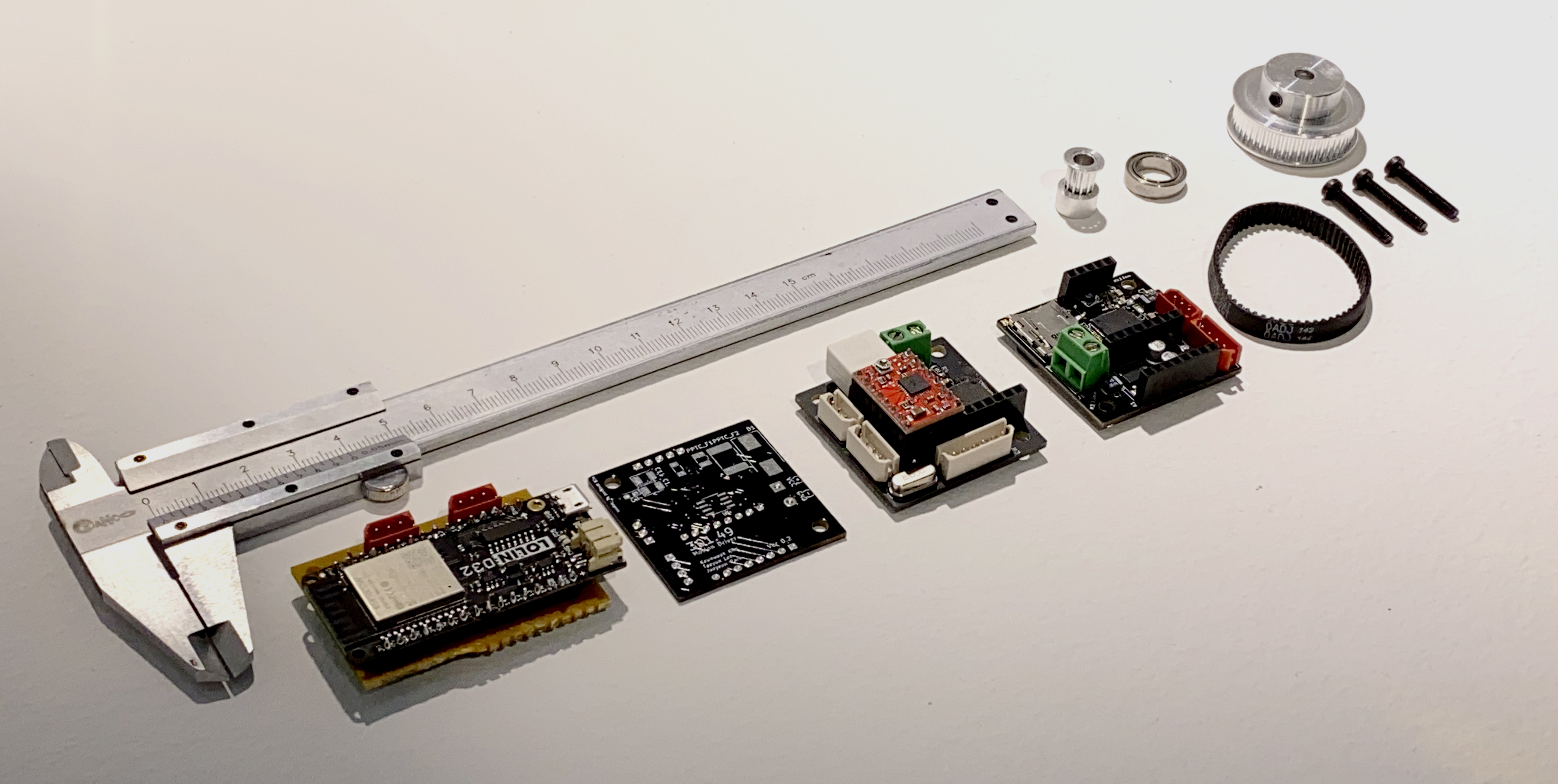
Mechanical / PCB design
PCB iterations
Engineering credit: Jaeyeon Park, Taeyun Li
Engineering credit: Jaeyeon Park, Taeyun Li
Interaction testing
Engineering credit: Jaeyeon Park, Taeyun Li
Engineering credit: Jaeyeon Park, Taeyun Li
Concept backgrounds
CG credit: Yejin Choi
CG credit: Yejin Choi



Final design exploded render

Laser cutting / assembly testing process
CNC machining process

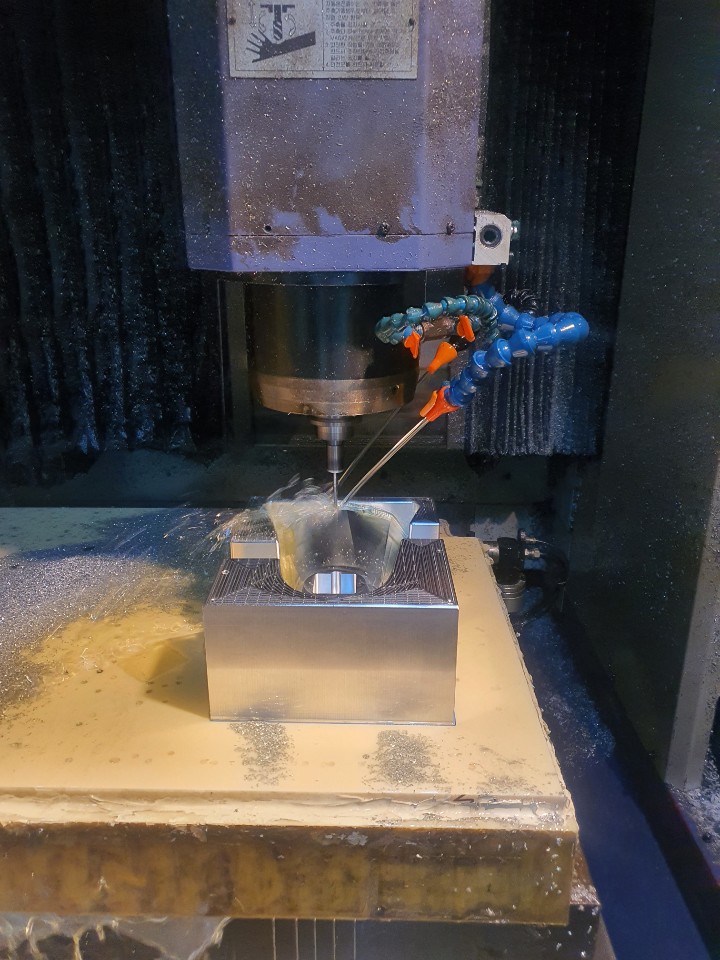

CNC machined aluminium parts

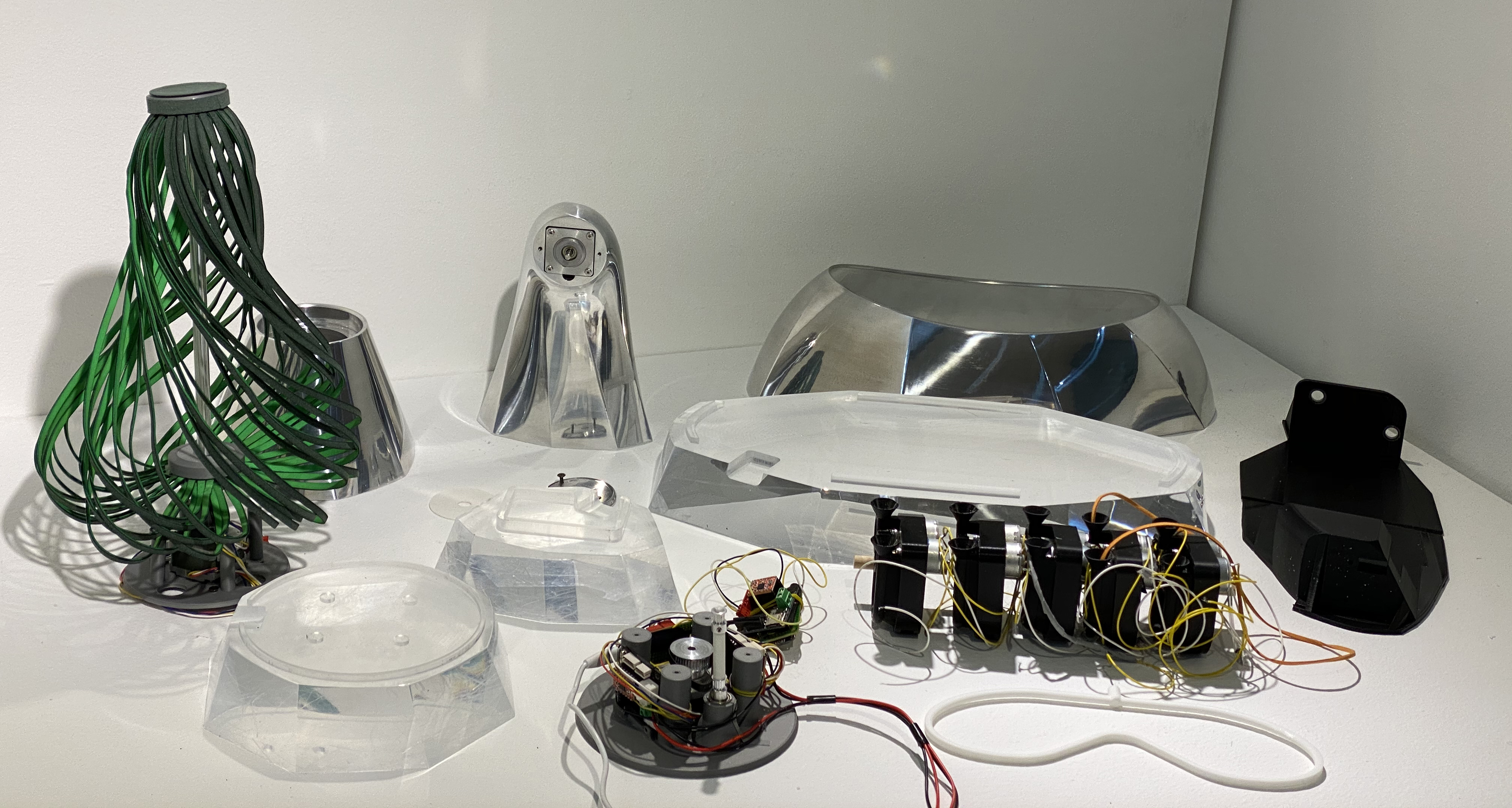
Final parts
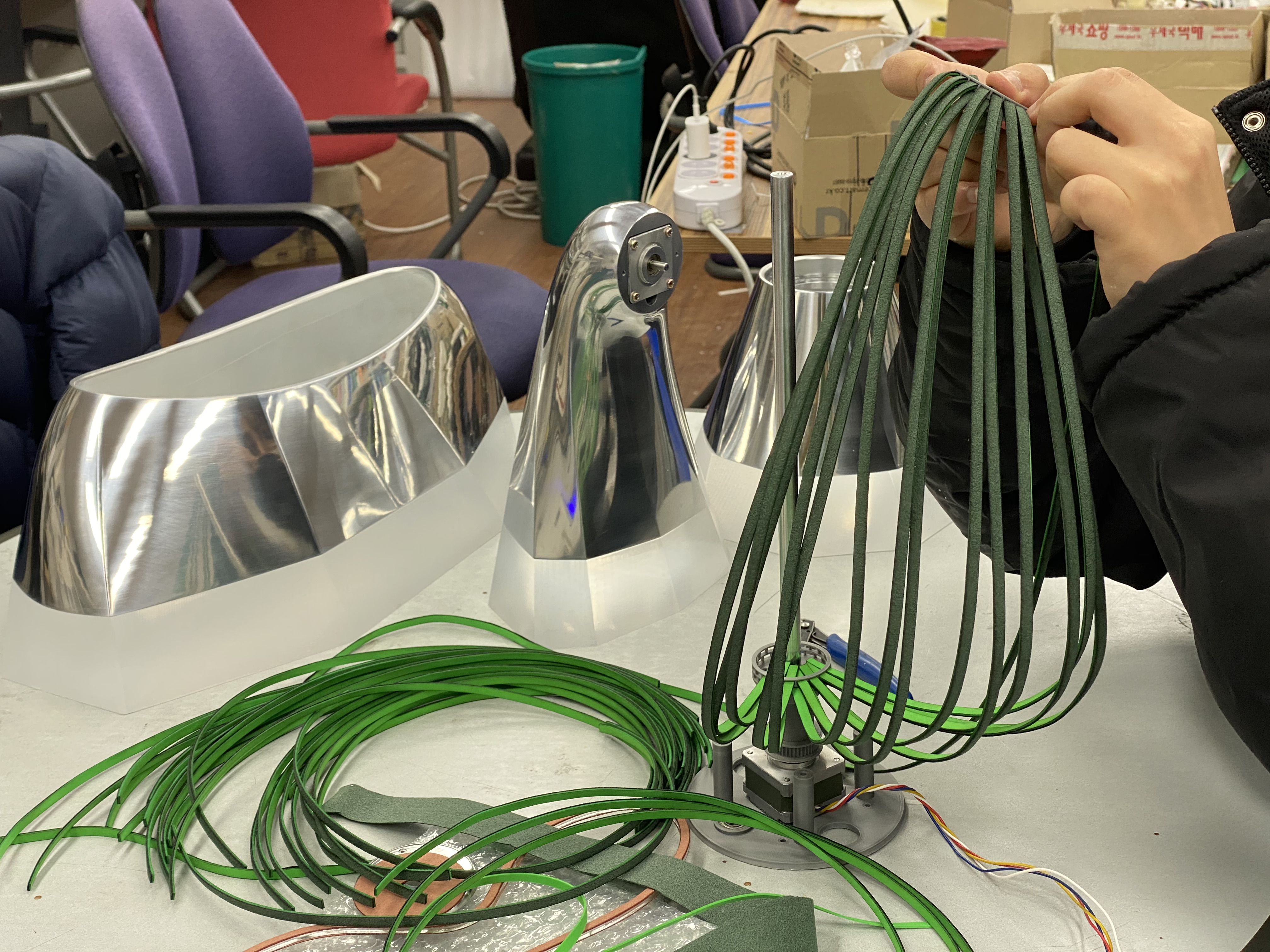
Assembly process
Final Images
Photography credit: Minkyeong Song
Model: Seungmin Lee
pp-1





pp-2




pp-3

Graduation Exhibition
Special Thanks to
Electrical engineering: Jaeyeon Park, Taeyun Li
Film production: Minkyeong Song, Lee Siyoung, Lee Seungmin
Photograph: Minkyeong Song
CG: Yejin Choi
Assistance: Yuri Lim, Yongjun Yu, Gaeun Kim
Advice: Junhwan Lee, Euichul Jung, Seona Lim, Juhong Park
*This project is funded by Undergraduate Research Program and Student Directed Education course from Faculty of Liberal Education, Seoul National University
Film production: Minkyeong Song, Lee Siyoung, Lee Seungmin
Photograph: Minkyeong Song
CG: Yejin Choi
Assistance: Yuri Lim, Yongjun Yu, Gaeun Kim
Advice: Junhwan Lee, Euichul Jung, Seona Lim, Juhong Park
*This project is funded by Undergraduate Research Program and Student Directed Education course from Faculty of Liberal Education, Seoul National University