tailspace
Commissioned project funded by ZER01NE(Hyundai Motor Group), 2021
Industrial design, Interaction design, Mechanical design, HRI research, Creative direction
Collaborated with
Software Development: Jooseung You
Logotype Typography: Hyunseo Cho, Yeongbeom Yu
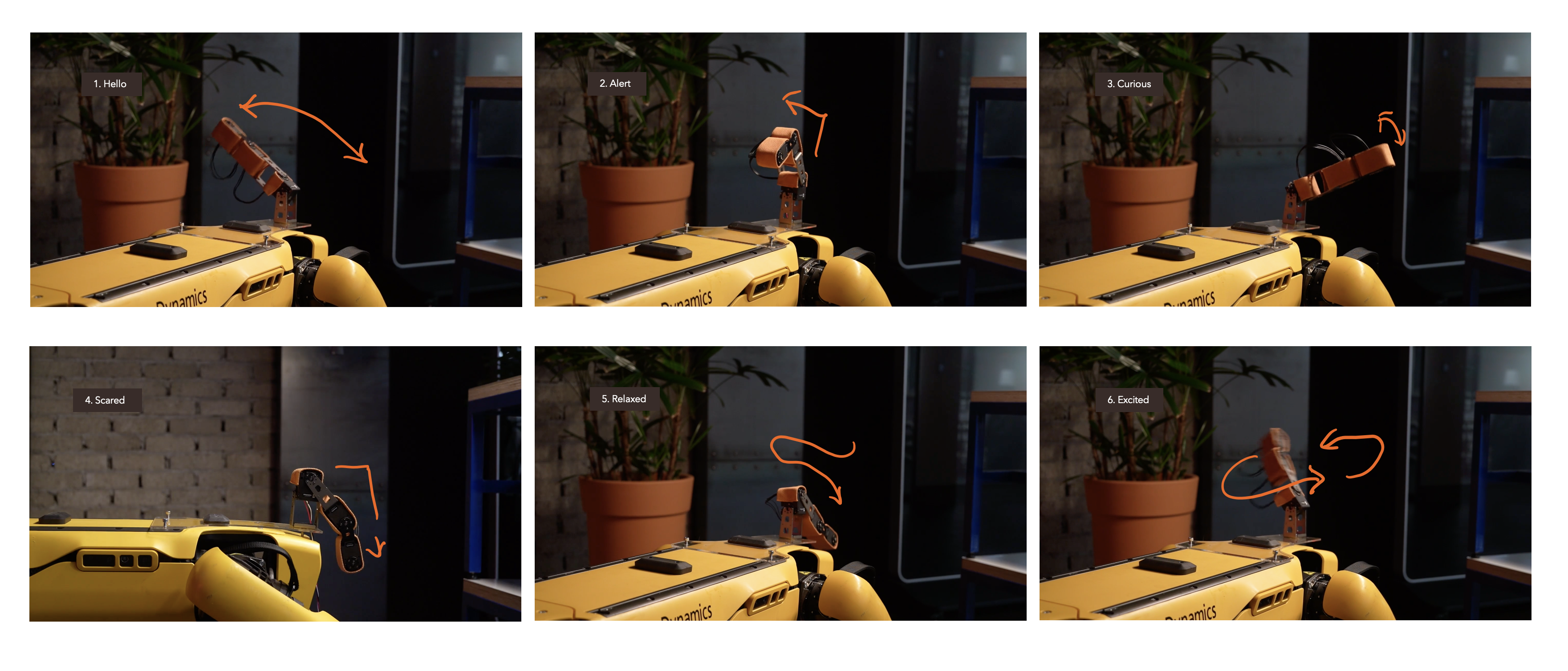
In 〈tailspace〉, Kim proposes that SPOT interacts through various friendly motions rather than being dictated by sensations and mechanical movement. In particular, SPOT expands communication and interaction by working with the tail of SPOT on interfaces, such as lines connected by several motors that can move by themselves. Audiences can imagine an interesting future in which humans and robots interact through SPOT wearing and being equipped with other applications.
Interaction / Motion Design

Emotion classication method by Russell’s circumplex model of aect Posner, J., Russell, J. A., and Peterson, B. S. “The circumplex model of aect: An integrative approach to aective neuroscience, cognitive development, and psychopathology.” Development and Psychopathology 17.3 (2005): 715-734. Print.
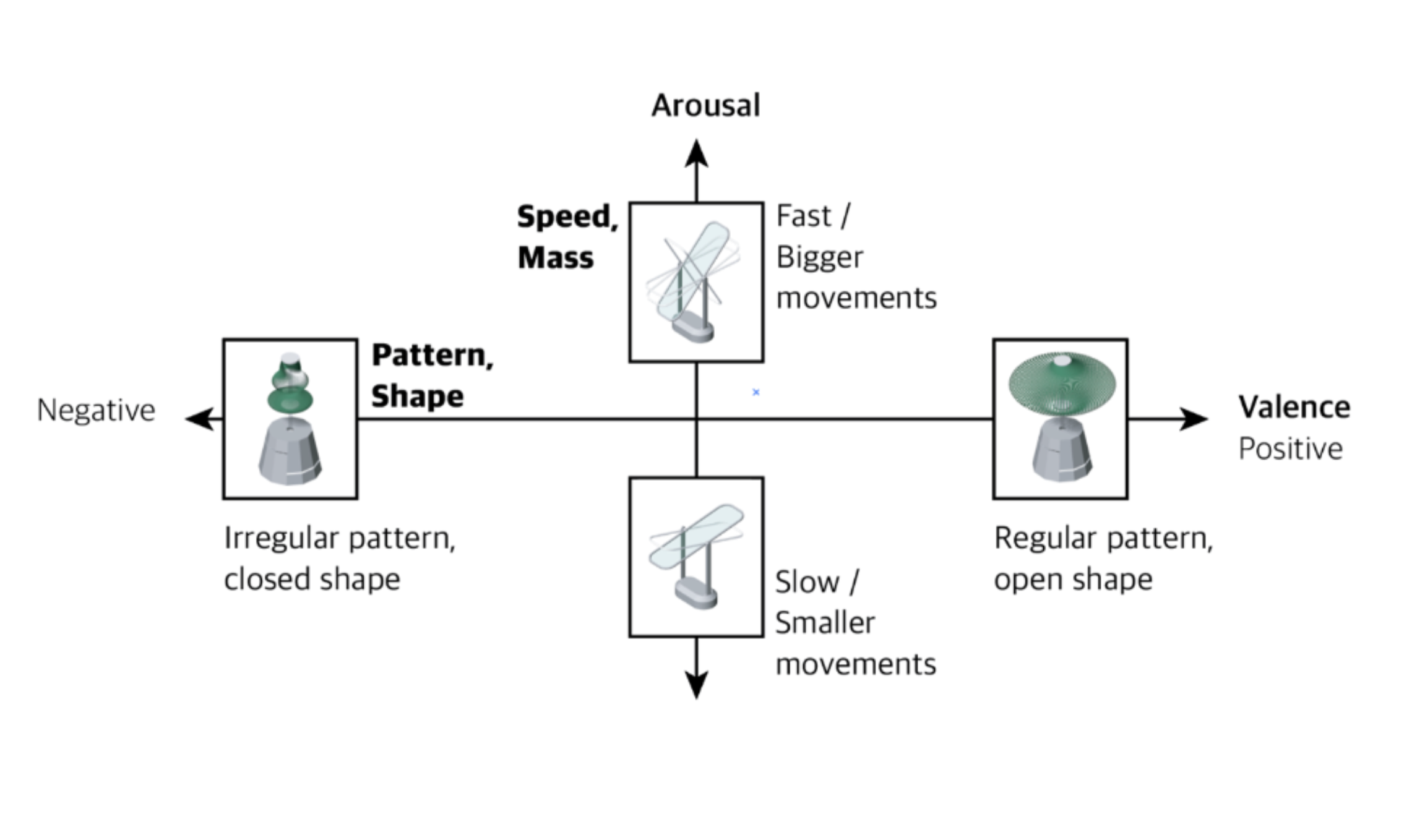
Applied model of Russell’s circumplex model to explain the relationship between movements, shapes and emotions. Keunwook Kim, Jaeyeon Park, and Taeyun Li. 2021. Post-plant: A Series of Non-humanoid Robots with Embedded Physical Non-verbal Interaction: The Development of Non-Verbal Human-Robot Interaction Framework and Input/Output Integrated Motor Interface. Extended Abstracts of the 2021 CHI Conference on Human Factors in Computing Systems. Association for Computing Machinery, New York, NY, USA, Article 200, 1–3. DOI:https://doi.org/10.1145/3411763.3451560
Mechanical Design
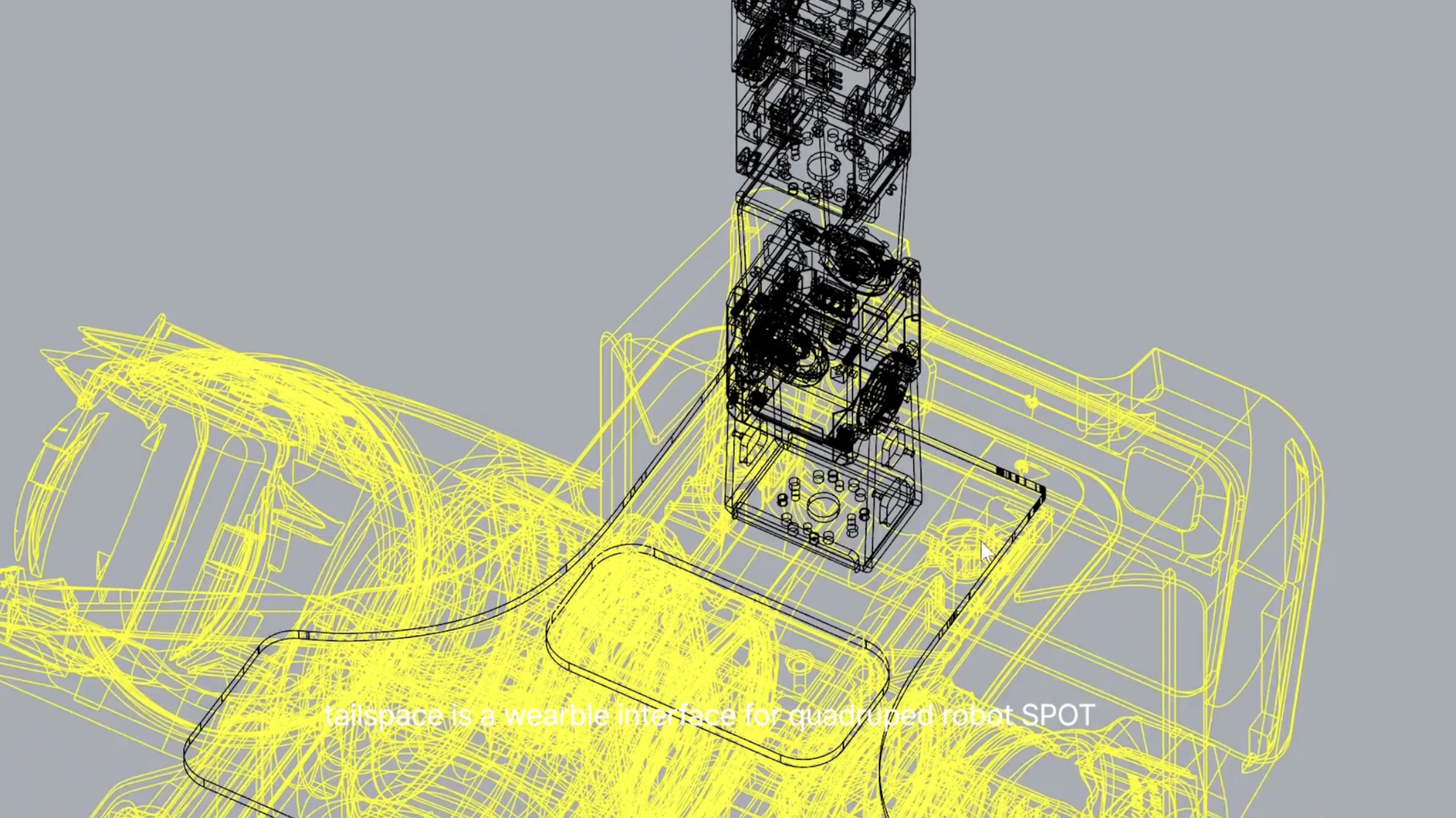
CAD Model
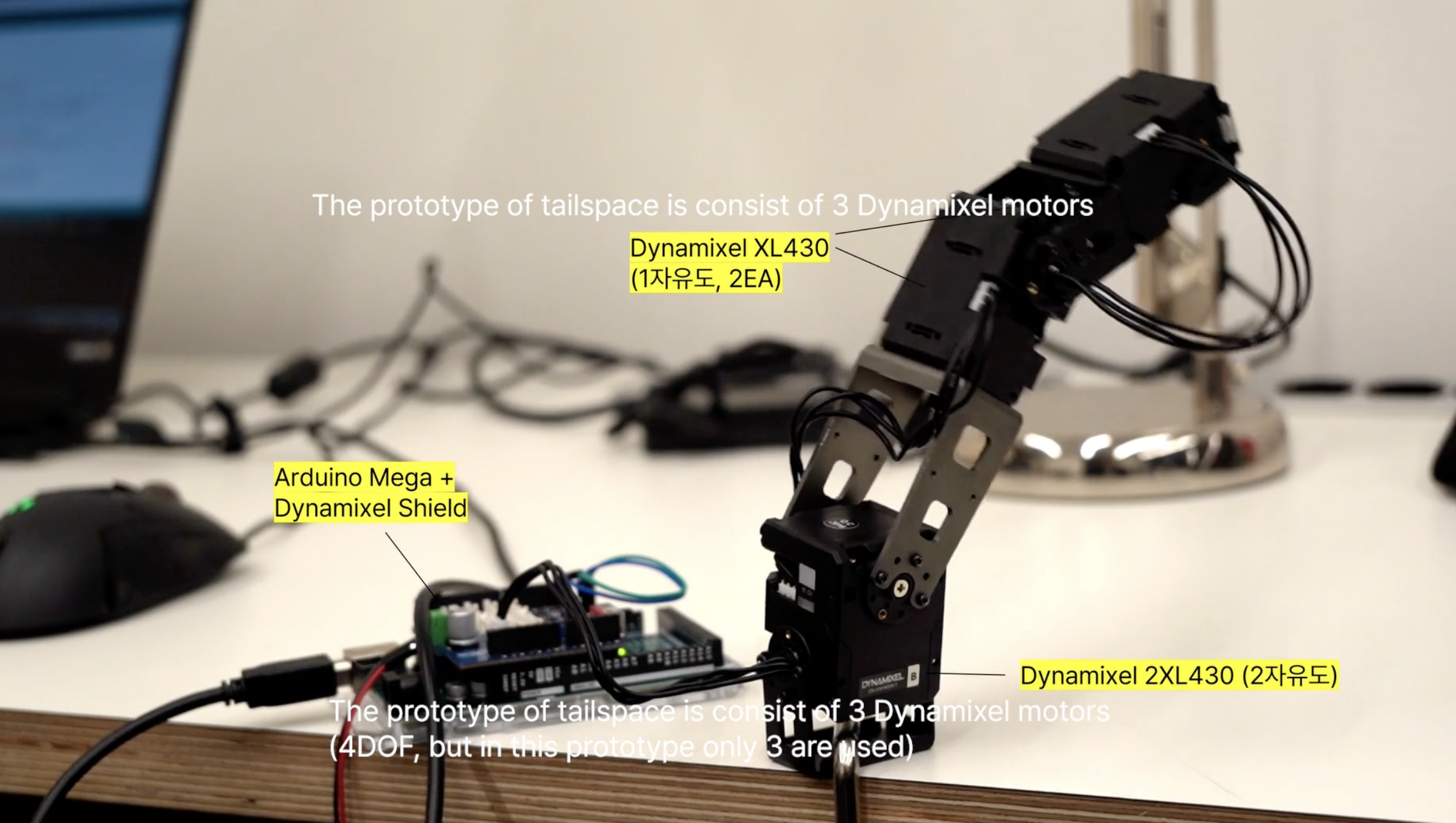
Actuator & Microcontroller configuration: Dynamixel Motors and Arduino Mega

Used three Dynamixel motors(4DOF, 3DOF used in the above motions) / Tested variations and optimized each motion
SPOT CoverDesign
Cover / Case design
for SPOT
for SPOT


CNC Milled parts



Case attatched on top of SPOT - covering battery and PC module
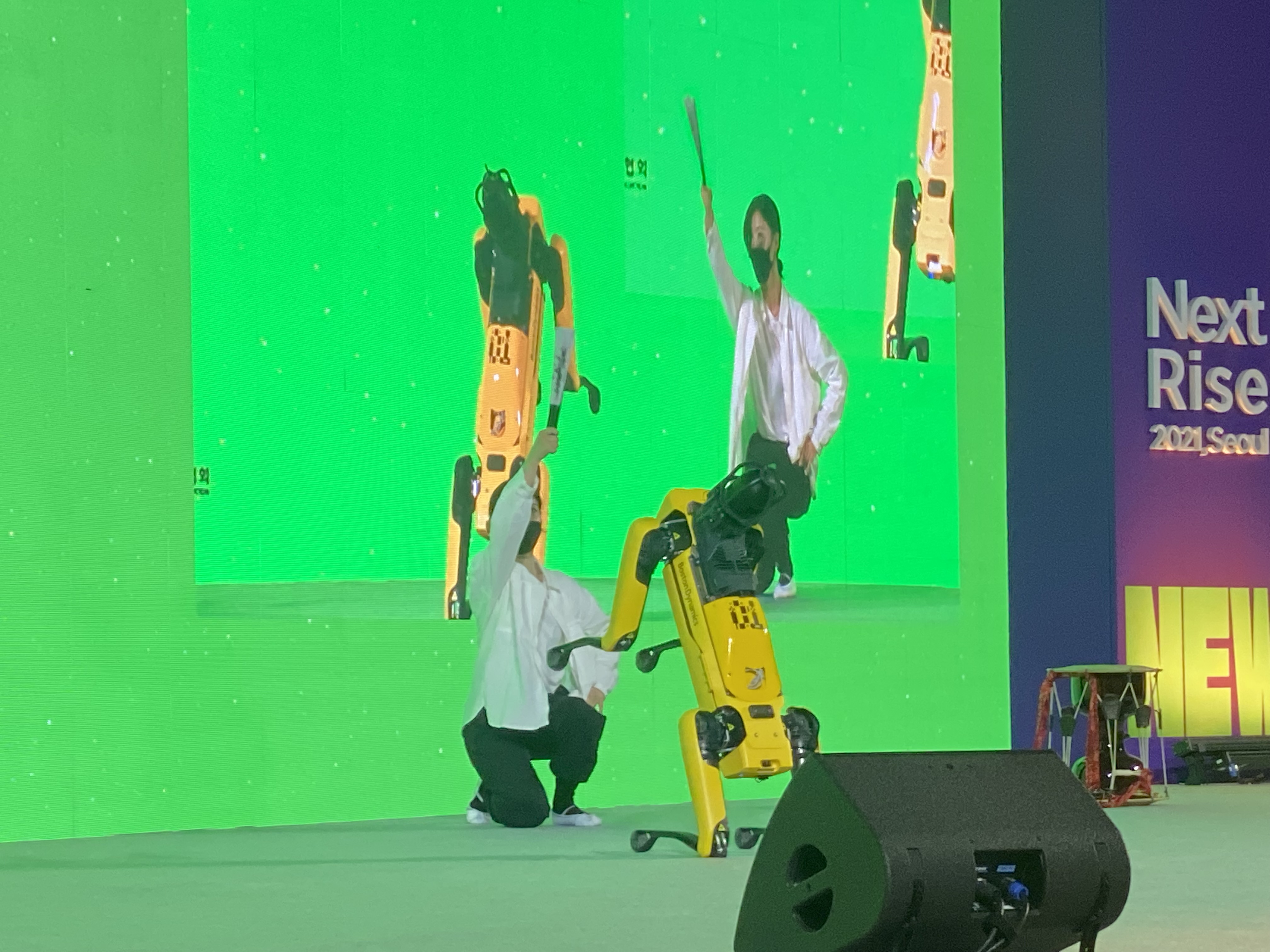
Exhibition Photos






Special Thanks to: Jaehyuk Bae, Yejin Kim